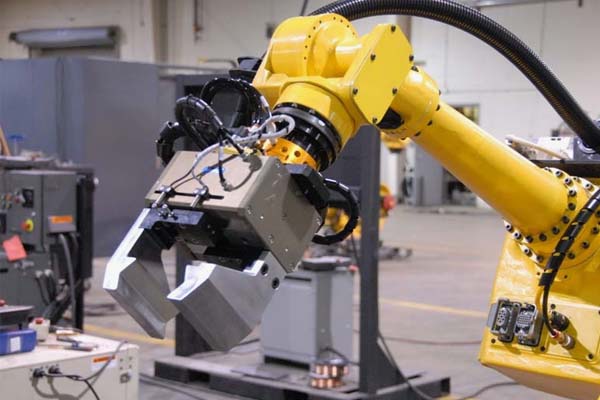


BesFoc机器人机械臂一体化伺服电机集高精度、高响应、高集成与工业级稳定性于一体,广泛应用于协作机器人、工业机器人及智能自动化设备,为现代机器人系统提供高效可靠的运动控制解决方案。在工业自动化、协作机器人、AGV搬运机器人、SCARA机械臂以及智能装配设备快速发展的背景下,高精度机器人机械臂驱动系统已经成为决定整机性能的核心部分。尤其是在电子制造、半导体、医疗设备、锂电设备以及自动化检测行业,对机械臂的速度、重复定位精度、响应效率以及稳定性提出了更高要求。传统“伺服电机+驱动器+编码器+复杂布线”的方案,已经难以满足现代机器人设备对于紧凑化、高集成化以及低维护成本的需求。此时,一体化BLDC
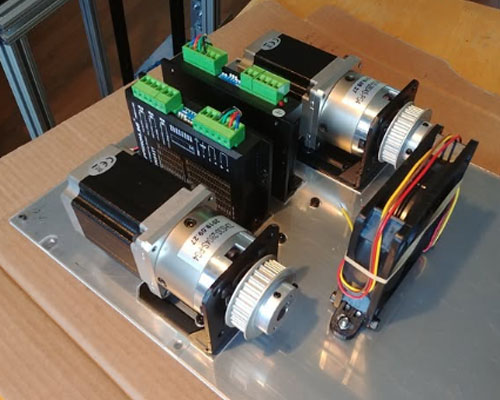
一体式伺服电机(电机、驱动器、编码器集成化设计)凭借高精度闭环控制、结构紧凑、响应速度快的特性,在灌装机的多个核心环节发挥关键作用,适配液体、膏体、粉剂等不同物料的灌装需求,具体实际应用如下:进瓶与定位环节灌装机的进瓶输送线需要将空瓶精准送至灌装工位,避免错位漏液。一体式伺服电机直接驱动输送带或分度盘,通过编码器的实时位置反馈,实现 **±0.1mm 级的定位精度 **,可根据瓶型规格(如圆形瓶、异形瓶)快速调整输送速度和停位角度,适配多规格产品的柔性生产。同时,伺服的软启动 / 软停止功能可避免瓶身碰撞,降低破损率。核心灌装计量环节这是灌装机的关键工序,一体式伺服电机主要驱动活塞泵、齿轮泵或